

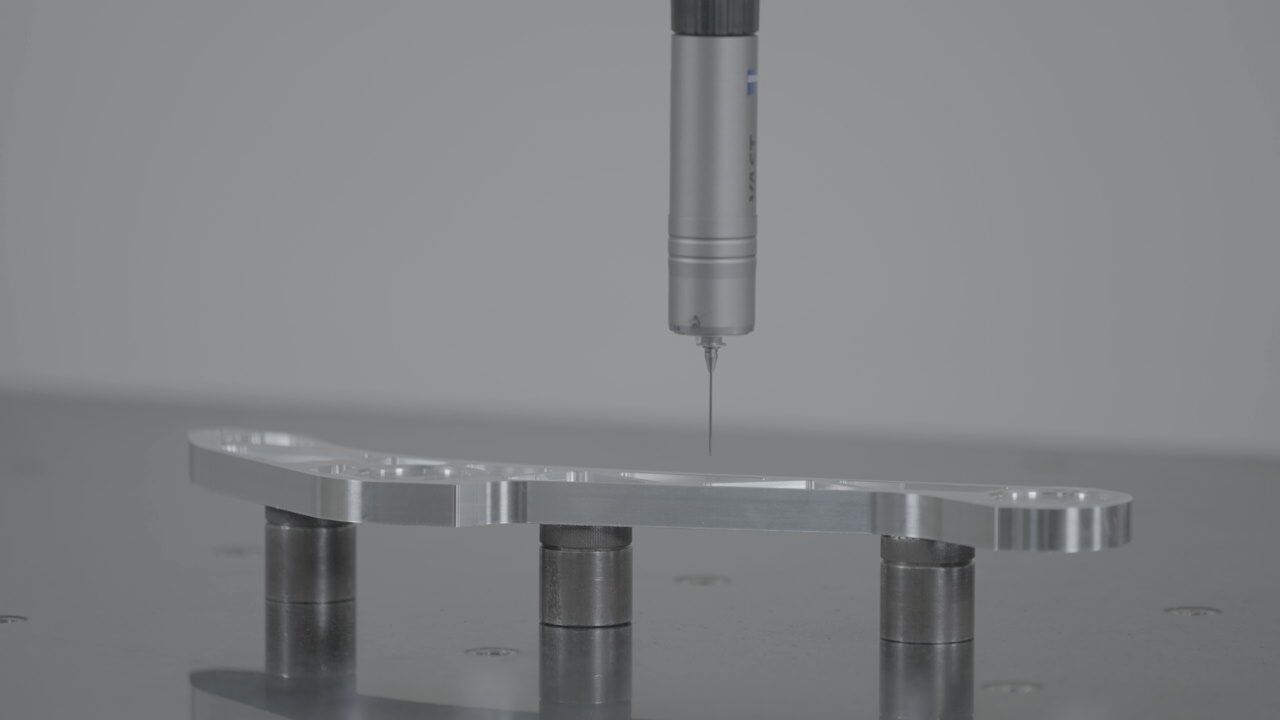
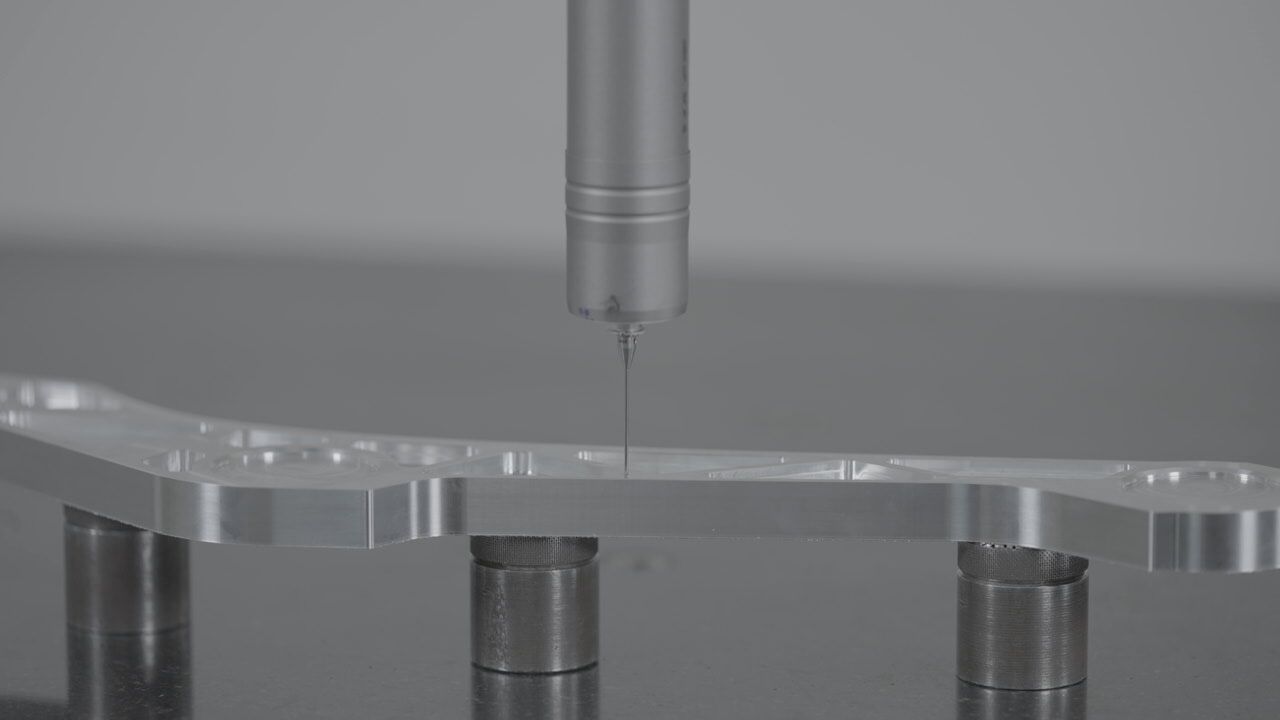
3D-модель NEW SPECTRUM включала технологію контактного сканування як стандартне обладнання. Це покращення також переносить всі 3D-серії в еру сканування. Функція контактного сканування може отримати більше точкових даних, а інформація про контури може отримати кращу надійність і повторюваність, ніж одноточкове вимірювання, щоб контролювати якість відправлення та зменшувати витрати виробництва.
Це наш новітній 3D CMM на заводі в Хуейчжоу. Можна контролювати допуск у межах +/-0,02 мм.

До речі, цим популяризуємо знання підказок про 3D CMM.
Трикоординатно-вимірювальна машина (зазвичай називається трикоординатною вимірювальною машиною), 3D-координатно-вимірювальна машина, іменована як ШМ
.
В основному використовується в машинобудівній промисловості. Такі, як автомобілі, кораблі, аерокосмічні засоби, форми, верстати тощо, для вимірювання геометричних розмірів, похибок форми та положення, а також контурів поверхні різних механічних деталей. Крім того, зараз він широко використовується в реверс-інженерії.
Деякі машини ШМ, оснащені лазерними зондами, також можна використовувати для вимірювання м’яких матеріалів і матеріалів з поверхнею, яка легко пошкоджується.
Найвищою точністю зараз є ШМ, вироблений німецькою компанією Zeiss і німецькою компанією Leitz.
Три координати — це трикоординатна вимірювальна машина, яка відноситься до приладу, здатного вимірювати геометричні форми, довжини та кругові поділки в просторі гексаедра. Його ще називають трикоординатною вимірювальною машиною або трикоординатною вимірювальною станцією.
Принцип роботи трьох координат
Будь-яка фігура складається з просторових точок, і всі геометричні вимірювання можна віднести до вимірювання просторових точок. Тому точний збір просторових координат точки є основою для оцінки будь-якої геометричної фігури.
Основний принцип трикоординатної вимірювальної машини полягає в тому, щоб помістити вимірювану частину в допустимий простір для вимірювання, точно виміряти значення точок на поверхні вимірюваної частини в трьох координатних положеннях простору та обробити значення координат. цих точок через комп’ютерні дані.
Підгонка для формування вимірювальних елементів, таких як кола, кулі, циліндри, конуси, криволінійні поверхні тощо, за допомогою математичних розрахунків для отримання їх форми, допуску положення та інших геометричних даних.
У вимірювальній техніці поява граткових лінійок, а пізніше ємнісних решіток, магнітних решіток та лазерних інтерферометрів зробила революцію в оцифровці інформації про розміри, що дозволяє не тільки цифрове відображення, але й комп’ютерну обробку для геометричних вимірювань, яка потім використовується для контролю рівня. База.
Трикоординатний вимірювальний прилад можна визначити як «детектор, який може рухатися в трьох напрямках і може рухатися по трьох взаємно перпендикулярних рейках.
Детектор передає сигнали контактними чи безконтактними тощо, а система вимірювання переміщення трьох осей (наприклад, оптична лінійка) є інструментом, який обчислює координати (X, Y, Z) кожної точки заготовки та різні функції через процесор даних або комп’ютер».
Вимірювальні функції трикоординатного вимірювального приладу повинні включати точність розмірів, точність позиціонування, геометричну точність і точність контуру.
Поле застосування трьох координат
Виміряти високоточні геометричні деталі та криволінійні поверхні;
Виміряти механічні деталі складної форми;
Виявлення поверхонь довільної форми;
Додатковий контактний або безконтактний зонд для безперервного сканування.
Функція трьох координат:
Ручне вимірювання трьохкоординатних геометричних елементів, включаючи точки, лінії, поверхні, кола, сфери, циліндри, конуси тощо;
Сканування кривих і поверхні, підтримка функції точкового сканування, виведення даних файлу IGES, визначення номінальних даних CAD, введення текстових даних ASCII, сканування номінальної кривої, аналіз контуру відповідно до визначення допуску.
Розрахунок допусків форми та положення, включаючи прямолінійність, площинність, округлість, циліндричність, перпендикулярність, нахил, паралельність, положення, симетрію, концентричність тощо;
Підтримує кілька методів виведення, наприклад традиційні звіти про виведення даних, графічні звіти про перевірку, графічні анотації даних та виведення етикеток даних.
--------------------- КІНЕЦЬ------------------------------------